

1. Cấu trúc Chương trình Arduino và Các Hàm Cốt lõi
Tóm tắt nội dung
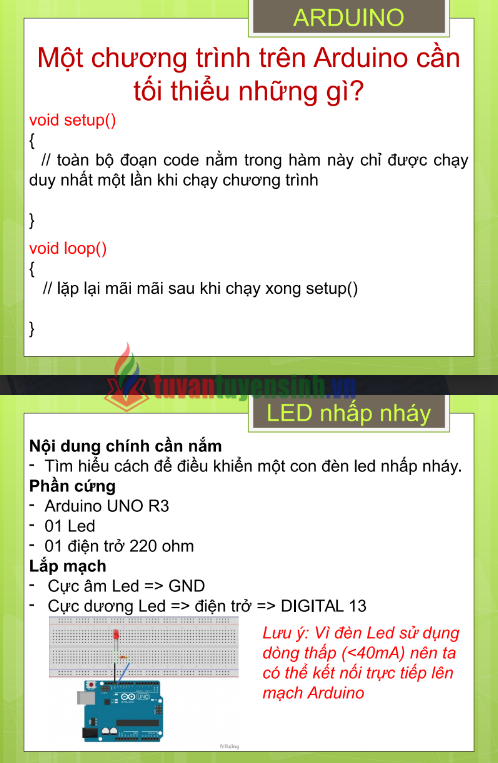
Trong lập trình Arduino, một chương trình hoạt động được cần có tối thiểu 2 hàm hệ thống chính và bắt buộc phải có. Đó là hàm setup() và hàm loop().
void setup(): Toàn bộ đoạn mã (code) nằm trong hàm này chỉ được chạy duy nhất một lần khi chương trình được khởi chạy. Hàm này thường được sử dụng để thiết lập các thông số ban đầu của chương trình và cấu hình các chân (pin) của mạch Arduino, ví dụ như khai báo chân đó là đầu vào (INPUT) hay đầu ra (OUTPUT).void loop(): Đoạn mã nằm trong hàm này sẽ lặp lại mãi mãi sau khi hàmsetup()đã chạy xong. Đây là nơi chứa logic chính của chương trình, nơi các lệnh điều khiển thiết bị được thực hiện liên tục.
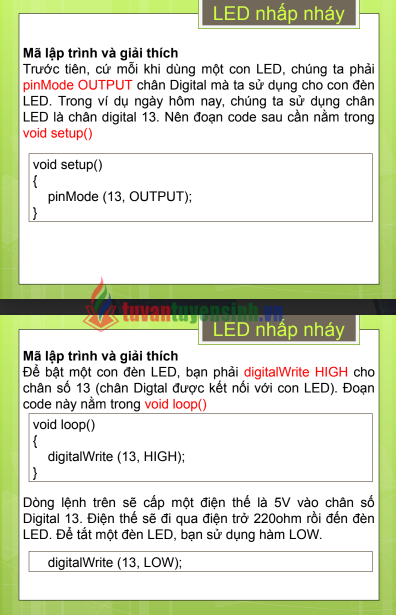
Trong ví dụ cơ bản đầu tiên về LED nhấp nháy, hàm setup() được dùng để thiết lập chân Digital 13 là đầu ra: pinMode (13, OUTPUT). Sau đó, hàm loop() sử dụng các lệnh digitalWrite để bật (HIGH) hoặc tắt (LOW) đèn LED và sử dụng hàm delay(1000) để dừng chương trình trong 1 giây (1000 mili giây), tạo ra hiệu ứng nhấp nháy.
Cảm nhận cá nhân
Cấu trúc chương trình với setup() và loop() là một triết lý thiết kế lập trình tuyệt vời, đặc biệt đối với môi trường vi điều khiển như Arduino. Nó giúp người học dễ dàng phân biệt giữa phần Khởi tạo (setup) và phần Thực thi liên tục (loop).
Hàm setup() thể hiện sự cần thiết của việc xác định trạng thái ban đầu và tài nguyên. Ví dụ, việc sử dụng lệnh pinMode trong setup() để khai báo một chân là OUTPUT (đầu ra) cho thấy tư duy cần phải rõ ràng về vai trò của từng chân trên mạch trước khi sử dụng. Điều này là nền tảng cho việc quản lý tài nguyên phần cứng một cách hiệu quả, đảm bảo rằng một chân không bị sử dụng đồng thời cho nhiều mục đích khác nhau.
Trong khi đó, hàm loop() là nơi sự sống của chương trình diễn ra, nơi các thao tác điều khiển thiết bị, thu thập dữ liệu từ cảm biến và phản ứng với môi trường bên ngoài được lặp lại vô tận. Khả năng lặp lại mãi mãi này là bản chất của các hệ thống nhúng (Embedded Systems), cho phép thiết bị hoạt động một cách tự động và liên tục mà không cần can thiệp.
Phần hướng dẫn về LED nhấp nháy là ví dụ kinh điển và hoàn hảo. Nó không chỉ đơn thuần là bài học về lệnh digitalWrite mà còn là bài học về thời gian thực (delay) và điện tử cơ bản (cần có điện trở 220 ohm để bảo vệ LED). Đây là một sự khởi đầu vững chắc, giúp người học nhanh chóng có được “thành quả” đầu tiên, tạo động lực lớn để tiếp tục khám phá các khái niệm phức tạp hơn.
2. Khai báo Biến, Kiểu Dữ liệu và Tính Cá nhân hóa
Tóm tắt nội dung
Tài liệu giới thiệu về Biến (variables) với mục đích chính là cá nhân hóa dòng lệnh và thay thế các giá trị số không rõ nghĩa bằng một tên có ý nghĩa. Thay vì phải gọi số 13 mỗi lần muốn điều khiển chân Digital 13, người lập trình có thể khai báo một biến và sử dụng tên biến đó.
Cấu trúc khai báo biến cơ bản là: [kiểu dữ liệu] [TenBien];.
Ví dụ: Khai báo biến tên led kiểu số nguyên và gán giá trị 13 cho nó: int led = 13. Tài liệu cũng lưu ý rằng tên biến phân biệt chữ hoa, chữ thường, không dấu và không khoảng trắng.
Các Kiểu dữ liệu quan trọng trong Arduino được liệt kê và giải thích chi tiết:
boolean: Chỉ nhận true hoặc false. Ví dụ:boolean Trang Thai = true;.char: Biểu diễn cho 1 KÝ TỰ. Ví dụ:char KyTu = "A";.byte: Biểu diễn số nguyên từ 0 đến 255. Ví dụ:byte A = 255;.int(Integer): Biểu diễn số nguyên từ -32,768 đến 32,767. Ví dụ:int led = 13;.long: Biểu diễn số nguyên trong phạm vi rộng hơn nhiều, từ -2,147,483,648 đến 2,147,483,647. Ví dụ:long B = -2147483648;.float: Biểu diễn số thực (có dấu chấm động). Ví dụ:float C = 3.14;.string: Biểu diễn kiểu chuỗi ký tự. Ví dụ:string D = "Nha Thieu Nhi";.
Sau khi khai báo, biến DenLed được sử dụng thay cho số 13 trong các lệnh pinMode và digitalWrite, giúp mã nguồn dễ đọc và dễ bảo trì hơn.
Cảm nhận cá nhân
Khái niệm về Biến (Variables) là một trong những cột mốc quan trọng nhất trong lập trình, và tài liệu đã làm rất tốt việc giải thích vai trò của nó không chỉ là nơi lưu trữ dữ liệu, mà còn là công cụ để cải thiện chất lượng mã nguồn (Code Readability).
Việc thay thế số 13 bằng DenLed là một ví dụ minh họa rõ ràng cho nguyên tắc “Magic Number” trong lập trình: không nên sử dụng các con số có ý nghĩa đặc biệt một cách trực tiếp trong mã nguồn. Nếu sau này, chân LED được chuyển từ 13 sang chân 7, người lập trình chỉ cần thay đổi giá trị của biến DenLed tại một nơi duy nhất thay vì phải rà soát và sửa đổi hàng chục chỗ khác nhau trong chương trình. Điều này giúp tiết kiệm thời gian và giảm thiểu lỗi, đặc biệt đối với các dự án lớn.
Phần giới thiệu về Các kiểu dữ liệu là rất chi tiết và cần thiết. Việc phân biệt rõ ràng giữa int (từ -32768 đến 32767) và long (từ -2,147,483,648 đến 2,147,483,647) cho thấy sự quan tâm đến việc quản lý bộ nhớ, một yếu tố quan trọng trong môi trường vi điều khiển có tài nguyên hạn chế. Người học được khuyến khích chọn kiểu dữ liệu phù hợp với phạm vi giá trị cần lưu trữ để tối ưu hóa việc sử dụng bộ nhớ (RAM) của mạch Arduino. Đối với các ứng dụng IoT phức tạp hơn, sự khác biệt giữa float (số thực) và int (số nguyên) là rất quan trọng khi xử lý dữ liệu từ cảm biến (ví dụ: nhiệt độ, độ ẩm thường là số thực).
Tóm lại, LAB này là bước chuyển từ việc chỉ gõ lệnh sang tư duy lập trình có hệ thống, nơi việc tổ chức dữ liệu bằng biến là chìa khóa để tạo ra mã nguồn linh hoạt và dễ bảo trì.
3. Khai báo Hàm Tự tạo và Tối ưu hóa Dòng lệnh
Tóm tắt nội dung
Phần này giới thiệu về Hàm (function) tự định nghĩa, với mục tiêu là rút gọn và cá nhân hóa dòng lệnh. Khi một nhóm lệnh được lặp đi lặp lại nhiều lần, việc tách chúng ra thành một hàm riêng giúp mã nguồn gọn gàng và dễ đọc hơn.
Trong ví dụ về LED nhấp nháy, mỗi lần tắt mở đèn LED cần tới 4 câu lệnh:
digitalWrite (DenLed, HIGH);//bật đèn LEDdelay(1000);//Dừng chương trình trong 1sdigitalWrite (DenLed, LOW);// tắt đèn LEDdelay(1000);//Dừng chương trình trong 1s
Để rút gọn 4 câu lệnh này, tài liệu hướng dẫn tạo một hàm riêng, ví dụ: void TatMoLed().
Cấu trúc hàm không trả về giá trị (void): void TenHam() { các câu lệnh thực hiện; }.
Sau khi tạo hàm, trong void loop(), người lập trình chỉ cần gọi hàm đó: TatMoLed();. Điều này làm cho đoạn mã trong loop() trở nên cực kỳ ngắn gọn, dễ hiểu và dễ quản lý. Tương tự như biến, tên hàm cũng cần phân biệt chữ hoa, chữ thường, không dấu và không khoảng trắng.
Cảm nhận cá nhân
Việc sử dụng Hàm là bước tiến hóa thứ ba, sau cấu trúc chương trình và biến. Nó đại diện cho nguyên tắc DRY (Don’t Repeat Yourself) trong kỹ thuật phần mềm. Bằng cách đóng gói (encapsulate) một chuỗi lệnh cụ thể (như TatMoLed) vào một hàm duy nhất, người lập trình đã tạo ra một “hộp đen” có thể sử dụng lại, giúp cấu trúc mã nguồn trở nên có tính module hóa (modular) cao.
Nếu chương trình cần nhấp nháy đèn LED ở 5 vị trí khác nhau trong loop(), việc gọi TatMoLed() 5 lần sẽ hiệu quả hơn rất nhiều so với việc lặp lại 4 câu lệnh cơ bản 5 lần (tổng cộng 20 dòng lệnh). Không chỉ rút gọn code, mà nếu sau này muốn thay đổi thời gian nhấp nháy từ 1000 mili giây thành 500 mili giây, người lập trình chỉ cần sửa đổi con số này một lần duy nhất bên trong định nghĩa hàm TatMoLed(). Điều này giảm đáng kể công sức bảo trì và khắc phục lỗi.
Hàm tự tạo là công cụ cơ bản nhất để xử lý sự phức tạp của chương trình. Khi dự án lớn hơn, các hàm có thể được tạo ra để điều khiển các module phần cứng riêng biệt (ví dụ: QuayDongCo(), DocGiaTriCamBien()). Việc này cho phép nhiều người cùng làm việc trên các phần khác nhau của dự án mà không ảnh hưởng đến nhau, thể hiện tư duy lập trình hướng đối tượng (Object-Oriented Programming) ở mức độ sơ khai.
4. Điều khiển Độ sáng LED bằng Tín hiệu Analog (PWM)
Tóm tắt nội dung
Phần này giới thiệu về việc sử dụng các chân Digital để xuất ra tín hiệu analog (hay còn gọi là xung PWM – Pulse Width Modulation) và ứng dụng nó để thay đổi độ sáng của đèn LED.
- Lưu ý quan trọng: Chỉ những chân Digital có dấu
~phía trước mới hỗ trợ xung PWM. Trong ví dụ này, LED được kết nối với chân Digital ~6. - Hàm
analogWrite(): Đây là lệnh xuất ra từ một chân trên mạch Arduino một mức tín hiệu analog (phát xung PWM).- Cấu trúc:
analogWrite ([chân phát xung PWM], [giá trị xung PWM]);. - Giá trị mức xung PWM nằm trong khoảng từ 0 đến 255, tương ứng với mức duty cycle từ 0% đến 100%.
- Ví dụ:
analogWrite (led, 127);là bật đèn LED ở mức 50% độ sáng , vàanalogWrite (led, 255);là bật đèn LED ở mức 100%.
- Cấu trúc:
- Ứng dụng: Tín hiệu PWM không chỉ dùng để điều khiển mức sáng tối của đèn LED mà còn được sử dụng rộng rãi để điều khiển tốc độ động cơ DC hay hướng quay của động cơ servo.
- Lưu ý phần cứng: Khi điều khiển động cơ, cần sử dụng mạch công suất động cơ (driver) thay vì kết nối động cơ trực tiếp với mạch Arduino.
Tài liệu còn cung cấp một ví dụ nâng cao, sử dụng biến dosang và giatri để tạo hiệu ứng LED sáng mờ dần rồi sáng rực trở lại (Fading) bằng cách thay đổi giá trị dosang từ 0 đến 255 và đảo ngược biến giatri khi đạt đến giới hạn.
Cảm nhận cá nhân
Phần này là bước ngoặt quan trọng, chuyển từ điều khiển Digital (bật/tắt – 2 trạng thái) sang điều khiển Analog (điều chỉnh mức – 256 trạng thái). Khái niệm PWM là nền tảng của nhiều ứng dụng trong điện tử nhúng. Việc giải thích giá trị PWM từ 0 đến 255 tương ứng với chu kỳ nhiệm vụ (duty cycle) từ 0% đến 100% là rất rõ ràng. Điều này giúp người học hiểu rằng Arduino không thực sự xuất ra một điện áp biến đổi (Analog Voltage) mà là một chuỗi xung Digital bật/tắt rất nhanh, và việc thay đổi độ rộng của các xung này sẽ tạo ra hiệu ứng điện áp trung bình (Average Voltage) mà mắt người (hoặc động cơ) cảm nhận được như là sự thay đổi độ sáng (hoặc tốc độ).
Việc ứng dụng PWM để điều khiển tốc độ động cơ DC là một ví dụ thực tiễn tuyệt vời. Tuy nhiên, tài liệu cũng đã đưa ra cảnh báo bảo mật và phần cứng rất quan trọng: Không được kết nối động cơ trực tiếp mà phải thông qua mạch công suất động cơ (driver). Điều này là bắt buộc vì động cơ thường yêu cầu dòng điện lớn hơn khả năng cung cấp của chân Digital Arduino (thường là dưới 40mA), nếu không sẽ làm hỏng vi điều khiển. Cảnh báo này cho thấy tính thực tế và an toàn kỹ thuật của tài liệu.
Ví dụ nâng cao về hiệu ứng Fading LED sử dụng điều kiện if (dosang == 0 || dosang == 255) để đảo ngược chiều sáng (biến giatri từ 5 thành -5) là một bài tập thông minh, tổng hợp kiến thức về Biến, Vòng lặp, Lệnh điều kiện (if-else), và Hàm analogWrite(), giúp củng cố kiến thức một cách hiệu quả.
5. Tích hợp Cảm biến và Cấu trúc Điều kiện (If-Else)
Tóm tắt nội dung
Phần này mở rộng phạm vi ứng dụng của Arduino sang việc thu thập dữ liệu từ môi trường thông qua các loại cảm biến (vật cản, âm thanh, ánh sáng, độ ẩm, mưa…) và sử dụng dữ liệu đó để điều khiển thiết bị (LED).
- Lắp mạch: Cảm biến được kết nối với cả chân Analog và Digital của Arduino. Ví dụ, chân A0 (Analog) và chân D0 (Digital) của cảm biến được nối với cổng A0 và Digital 2 trên mạch Arduino tương ứng.
- Tín hiệu:
- Tín hiệu Digital: Chỉ mang giá trị LOW (0V) hoặc HIGH (5V).
- Tín hiệu Analog: Mang giá trị từ 0 đến 1023 (tương ứng với 0V đến 5V).
- Lập trình: Cần khai báo các chân kết nối cảm biến dưới dạng đầu vào (
INPUT) trongsetup().- Hàm đọc Digital:
digitalRead(cambienD). - Hàm đọc Analog:
analogRead(cambienA).
- Hàm đọc Digital:
- Cấu trúc điều kiện
if-else: Được sử dụng để ra quyết định dựa trên giá trị đọc được từ cảm biến.- Cấu trúc:
if (điều kiện đúng) { thực hiện lệnh } else { thực hiện lệnh khác };. - Ví dụ:
- Điều kiện Digital: Nếu
digitalRead(cambienD) == HIGH(có tín hiệu) thì bật LED. - Điều kiện Analog: Nếu
analogRead(cambienA) <= 512(giá trị nhỏ hơn hoặc bằng 512) thì bật LED.
- Điều kiện Digital: Nếu
- Cấu trúc:
- Toán tử so sánh: Tài liệu liệt kê đầy đủ các toán tử so sánh (
==,!=,<,>,<=,>=) và toán tử logic (&&– Và,||– Hoặc).
Cảm nhận cá nhân
Phần Cảm biến này là trái tim của lập trình ứng dụng và IoT. Nó định nghĩa rõ ràng sự khác biệt giữa Tín hiệu Digital và Tín hiệu Analog, cùng với các hàm tương ứng để đọc chúng (digitalRead và analogRead). Khoảng giá trị 0 đến 1023 cho tín hiệu Analog là một thông số kỹ thuật quan trọng (độ phân giải 10-bit ADC của Arduino UNO), và người học cần hiểu rằng 512 là điểm giữa, tương ứng với khoảng 2.5V điện áp đầu vào, là một ngưỡng logic để phân loại dữ liệu.
Sự kết hợp giữa đọc dữ liệu từ cảm biến và sử dụng cấu trúc if-else là bước chuyển từ điều khiển đơn thuần sang Hệ thống phản ứng (Reactive System). Khả năng ra quyết định (if) dựa trên điều kiện môi trường (analogRead hoặc digitalRead) là điều làm cho Arduino trở nên mạnh mẽ. Ví dụ, chương trình có thể quyết định: Nếu cường độ ánh sáng (analogRead) nhỏ hơn 512 thì bật đèn LED; Ngược lại (ánh sáng đủ) thì tắt đèn. Điều này mô phỏng hoạt động của một hệ thống chiếu sáng tự động.
Việc giới thiệu đầy đủ các Toán tử so sánh và Toán tử logic (&& và ||) là nền tảng cho việc tạo ra các điều kiện phức tạp hơn, ví dụ: “Nếu có vật cản VÀ trời tối thì dừng động cơ.” Điều này giúp người học mở rộng khả năng xây dựng các logic điều khiển phức tạp, đáp ứng nhu cầu của các dự án robotics và tự động hóa.
6. Điều khiển Động cơ DC thông qua Mạch công suất L298
Tóm tắt nội dung
Phần cuối cùng trong tài liệu tập trung vào việc điều khiển Động cơ DC (Direct Current Motor), là một thành phần thiết yếu trong các ứng dụng robot và xe điều khiển.
- Phần cứng: Yêu cầu 02 động cơ DC và quan trọng nhất là 01 mạch công suất động cơ L298 (Motor Driver).
- Lắp mạch: Mạch L298 làm trung gian giữa Arduino và động cơ.
- Nguồn: Cấp nguồn ngoài (ví dụ 12V) vào chân VCC/GND của mạch L298 để cấp điện cho động cơ (vì động cơ tiêu thụ dòng lớn hơn Arduino).
- Điều khiển chiều quay (Direction): Các chân điều khiển logic INA, INB, INC, IND được nối với các chân Digital 2, 3, 4, 5 của Arduino. Chiều quay được xác định bởi tổ hợp HIGH/LOW của cặp chân (INA/INB).
- Điều khiển tốc độ (Speed): Các chân ENA, ENB (Enable) được nối với các chân Digital PWM (~9, ~10) của Arduino.
- Lập trình:
- Các chân điều khiển đều được khai báo là
OUTPUTtrongsetup(). - Tài liệu sử dụng các hàm tự tạo (
void Tien(),void Lui(),void Trai(),void Phai()) để nhóm các lệnh điều khiển. - Tốc độ được điều khiển bằng
analogWrite(ENx, 0-255). - Chiều quay được điều khiển bằng
digitalWrite(INx, HIGH/LOW). - Ví dụ: Hàm
Tien()thiết lập tốc độ là 127 (50%) và đặt chiều quay INA=HIGH, INB=LOW (Motor 1) và INC=HIGH, IND=LOW (Motor 2). HàmTrai()tắt Motor 1 (analogWrite(ENA, 0)) và cho Motor 2 quay hết tốc độ (analogWrite(ENB, 255)).
- Các chân điều khiển đều được khai báo là
Cảm nhận cá nhân
Việc điều khiển động cơ DC, đặc biệt là thông qua một mạch cầu H (H-Bridge) như L298, là một ứng dụng rất thực tế và nâng cao của Arduino, là bước chuẩn bị để xây dựng các loại robot di động.
Sự cần thiết của mạch công suất L298 tái khẳng định nguyên tắc phân tách giữa Mạch điều khiển (Arduino) và Mạch công suất (L298). Mạch L298 chịu trách nhiệm cung cấp dòng điện lớn và điện áp cao (12V) cho động cơ , trong khi Arduino chỉ cung cấp tín hiệu logic (HIGH/LOW) ở mức thấp (5V). Việc này không chỉ bảo vệ mạch Arduino mà còn đảm bảo động cơ hoạt động với công suất cần thiết. Đây là một khái niệm cơ bản nhưng cực kỳ quan trọng trong kỹ thuật điện tử.
Cấu trúc lập trình sử dụng các hàm Tien(), Lui(), Trai(), Phai() là một ví dụ tuyệt vời về tính module hóa (modularization) của code. Bằng cách này, người lập trình có thể dễ dàng xây dựng các thuật toán điều khiển phức tạp hơn (ví dụ: né vật cản, đi theo vạch) bằng cách chỉ gọi tên hàm, thay vì phải lặp lại các lệnh analogWrite và digitalWrite nhiều lần. Ví dụ, hàm Trai() và Phai() minh họa việc điều khiển sự chênh lệch tốc độ giữa hai bánh xe (analogWrite(ENA, 0) và analogWrite(ENB, 255)) để tạo ra chuyển động rẽ.
Phần này là sự tổng hợp hoàn hảo của tất cả các khái niệm đã học: Biến (INA, ENB), Hàm (Tien, Lui), Điều khiển Digital (chiều quay), và Điều khiển Analog/PWM (tốc độ).
Cảm nhận Tổng thể và Đánh giá
Tài liệu “Lập Trình Arduino” là một tài liệu hướng dẫn tự học xuất sắc, tập trung vào tính thực hành và ứng dụng thực tế. Nó đã hoàn thành xuất sắc vai trò của một tài liệu nhập môn, cung cấp một lộ trình rõ ràng, từ những bước cơ bản nhất (cấu trúc chương trình) đến các ứng dụng phức tạp (điều khiển động cơ và cảm biến).
Điểm mạnh nổi bật:
- Cấu trúc học tập Logic: Tài liệu tuân theo một tiến trình học tập rất hợp lý: từ việc làm quen với môi trường lập trình (hàm
setup/loop), quản lý dữ liệu (Biến và Kiểu dữ liệu), tổ chức code (Hàm tự tạo), đến ứng dụng phần cứng cơ bản (LED) và nâng cao (Cảm biến, Động cơ). - Chi tiết về Kỹ thuật Điện tử: Tài liệu không chỉ hướng dẫn lập trình mà còn đưa ra các cảnh báo kỹ thuật và kiến thức nền tảng quan trọng, chẳng hạn như việc sử dụng điện trở 220 ohm để bảo vệ LED , sự cần thiết của mạch công suất L298 cho động cơ , và phân biệt chân PWM (dấu
~). Điều này đảm bảo tính an toàn và khả thi của các dự án phần cứng. - Tập trung vào CLI: Mặc dù Arduino sử dụng IDE đồ họa, nhưng các lệnh điều khiển (
digitalWrite,analogWrite,pinMode,delay) được giải thích rõ ràng, giúp người học làm chủ ngôn ngữ lập trình C/C++ trên nền tảng Arduino.
Tiềm năng phát triển và Mở rộng:
Mặc dù tài liệu đã bao phủ một phạm vi kiến thức rộng, nhưng để đạt được mức độ chuyên sâu hơn, người học có thể tìm hiểu thêm về các khái niệm sau:
- Lập trình Nối tiếp (Serial Communication): Sử dụng hàm
Serial.begin()vàSerial.print()để theo dõi và gỡ lỗi chương trình, đặc biệt là khi đọc giá trị Analog từ cảm biến. - Ngắt (Interrupts): Cho phép Arduino phản ứng tức thì với các sự kiện bên ngoài (ví dụ: nhấn nút) thay vì chỉ kiểm tra liên tục trong
loop(), giúp chương trình trở nên hiệu quả hơn. - Thư viện (Libraries): Giới thiệu cách sử dụng các thư viện phức tạp hơn (ví dụ: Servo, LCD, Ethernet) để mở rộng khả năng của Arduino mà không cần phải viết lại code từ đầu.
Tóm lại, bộ tài liệu “Lập Trình Arduino” này là một nguồn tài nguyên quý giá, cung cấp cho người học những công cụ và kiến thức cơ bản để biến các ý tưởng sáng tạo thành các mô hình điện tử thực tế, từ một LED nhấp nháy đơn giản đến một robot điều khiển động cơ phức tạp. Đây là bước đệm hoàn hảo để bước vào lĩnh vực Maker và Kỹ thuật Điện tử hiện đại.