Tài liệu “ASM CÔNG NGHỆ KĨ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA – Tìm hiểu và thiết kế robot gắp hàng và xếp hàng – CD FPT” là một bài nghiên cứu và thực hành chuyên sâu về lĩnh vực robot học và tự động hóa, được thực hiện bởi sinh viên chuyên ngành Công nghệ Kỹ thuật Điều khiển và Tự động hóa tại Cao đẳng FPT. Tài liệu này tập trung vào việc tìm hiểu lý thuyết và thiết kế một robot có khả năng gắp và xếp hàng hóa.
TRƯỜNG CAO ĐẲNG FPT POLYTECHNIC
BỘ MÔN: ĐIỆN – CƠ KHÍ
FPT POLYTECHNIC
ASSIGNMENT
CHUYÊN NGÀNH: CÔNG NGHỆ KĨ THUẬT ĐIỀU KHIỂN
VÀ TỰ ĐỘNG HÓA
MÔN: AE19302 -PLC Nâng Cao
ĐỀ TÀI: Tìm hiểu và thiết kế robot gắp hàng và xếp hàng
GIÁO VIÊN HƯỚNG DẪN
NHÓM THỰC HIỆN
LỚP
: Cô Nguyễn Thị Lan
: NHÓM 7
: AE 19302
THÀNH VIÊN NHÓM
HOÀNG HỒNG SƠN
NGUYỄN XUÂN SƠN
ĐỖ ANH DUY
MSSV: PH51964
MSSV: PH52452
MSSV: PH50086
HÀ NỘI-2024
MỤC LỤC
Bảng phân công nhiệm vụ3
CHƯƠNG 1: TÌM HIỂU-LÝ DO CHỌN ĐỀ TÀI5
1. Lý do chọn đề tài5
2. Tìm hiểu về đề tài6
3. Ứng dụng của đề tài7
CHƯƠNG 2: THIẾT KẾ SẢN PHẨM8
1. Bản vẽ thiết kế8
2. Nguyên lý hoạt động13
CHƯƠNG 3: THI CÔNG SẢN PHẨM14
1. Lập bảng vật tư14
2. Thi công sản phẩm15
3. Viết chương trình điều khiển20
4. Vận hành22
CHƯƠNG 4: KẾT LUẬN23
1. Những mục tiêu đã đạt được23
2. Hạn chế và khó khăn24
3. Mở rộng đề tài25
Tài liệu tham khảo26
CHƯƠNG 1: TÌM HIỂU LÝ DO CHỌN ĐỀ TÀI
1. Lý do chọn đề tài
Trong bối cảnh phát triển mạnh mẽ của cuộc cách mạng công nghiệp 4.0, việc ứng dụng robot trong sản xuất và kho vận ngày càng trở nên phổ biến nhằm nâng cao hiệu suất, độ chính xác và tối ưu hóa chi phí vận hành. Trong đó, robot gắp hàng và xếp hàng là một trong những giải pháp quan trọng giúp tự động hóa quy trình sản xuất và logistics.
Việc nghiên cứu và thiết kế robot gắp hàng và xếp hàng mang lại nhiều lợi ích thiết thực:
- Tăng năng suất lao động: Robot có thể hoạt động liên tục, giảm thiểu thời gian nghỉ so với lao động thủ công.
- Nâng cao độ chính xác và an toàn: Khả năng thao tác chính xác cao giúp hạn chế hư hỏng hàng hóa và giảm nguy cơ tai nạn lao động.
- Tối ưu chi phí phí vận hành: Sử dụng robot giúp giảm chi phí nhân công và tối ưu hóa quy trình xếp dỡ hàng hóa.
- Ứng dụng đa dạng: Robot gắp hàng và xếp hàng có thể áp dụng trong nhiều lĩnh vực như sản xuất công nghiệp, logistics, kho bãi và cảng biển.
Nhận thấy tầm quan trọng của giải pháp robot trong sản xuất và logistics, nhóm đã quyết định chọn đề tài “Tìm hiểu và thiết kế robot gắp hàng và xếp hàng” với mong muốn:
- Tìm hiểu các công nghệ hiện đại và giải pháp kỹ thuật liên quan đến robot công nghiệp.
- Nghiên cứu và thiết kế một mô hình robot thực tế có khả năng gắp và xếp hàng hiệu quả.
- Góp phần vào việc nâng cao nhận thức và khả năng ứng dụng công nghệ robot trong ngành công nghiệp tại Việt Nam.
Thông qua đề tài này, nhóm hy vọng có thể phát triển kỹ năng nghiên cứu, thiết kế và lắp trình robot, đồng thời đóng góp những giá trị hữu ích cho lĩnh vực tự động hóa trong công nghiệp.
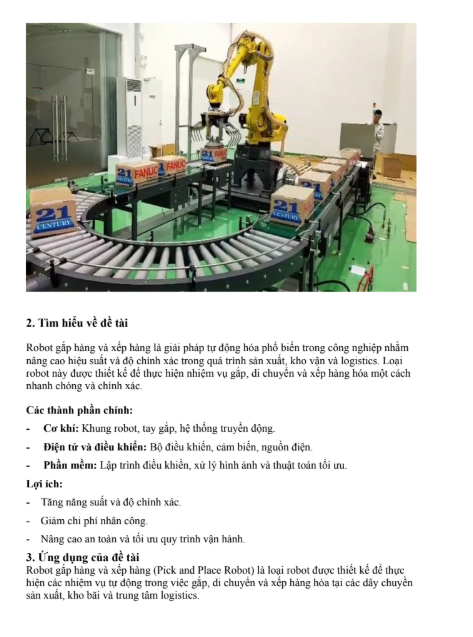
2. Tìm hiểu về đề tài
Robot gắp hàng và xếp hàng là giải pháp tự động hóa phổ biến trong công nghiệp nhằm nâng cao hiệu suất và độ chính xác trong quá trình sản xuất, kho vận và logistics. Loại robot này được thiết kế để thực hiện nhiệm vụ gắp, di chuyển và xếp hàng hóa một cách nhanh chóng và chính xác.
Các thành phần chính:
- Cơ khí: Khung robot, tay gắp, hệ thống truyền động.
- Điện tử và điều khiển: Bộ điều khiển, cảm biến, nguồn điện.
- Phần mềm: Lập trình điều khiển, xử lý hình ảnh và thuật toán tối ưu.
Lợi ích:
- Tăng năng suất và độ chính xác.
- Giảm chi phí nhân công.
- Nâng cao an toàn và tối ưu quy trình vận hành.
3. Ứng dụng của đề tài
Robot gắp hàng và xếp hàng (Pick and Place Robot) là loại robot được thiết kế để thực hiện các nhiệm vụ tự động trong việc gắp, di chuyển và xếp hàng hóa tại các dây chuyền sản xuất, kho bãi và trung tâm logistics.
Dưới đây là hình ảnh tài liệu: